Torque is the twisting force that the engine produces. The torque from the engine is what moves your car. The various gears in the transmission and differential multiply the torque and split it up between the wheels. More torque can be sent to the wheels in first gear than in fifth gear because first gear has a larger gear-ratio by which to multiply the torque.
The bar graph below indicates the amount of torque that the engine is producing. The mark on the graph indicates the amount of torque that will cause wheel slip. The car that makes a good start never exceeds this torque, so the tires don't slip; the car that makes a bad start exceeds this torque, so the tires slip. As soon as they start to slip, the torque drops down to almost zero.
The interesting thing about torque is that in low-traction situations, the maximum amount of torque that can be created is determined by the amount of traction, not by the engine. Even if you have a NASCAR engine in your car, if the tires won't stick to the ground there is simply no way to harness that power.
For the sake of this article, we'll define traction as the maximum amount of force the tire can apply against the ground (or that the ground can apply against the tire -- they're the same thing). These are the factors that affect traction:
The weight on the tire -- The more weight on a tire, the more traction it has. Weight can shift as a car drives. For instance, when a car makes a turn, weight shifts to the outside wheels. When it accelerates, weight shifts to the rear wheels. (See How Brakes Work for more details.)
The coefficient of friction -- This factor relates the amount of friction force between two surfaces to the force holding the two surfaces together. In our case, it relates the amount of traction between the tires and the road to the weight resting on each tire. The coefficient of friction is mostly a function of the kind of tires on the vehicle and the type of surface the vehicle is driving on. For instance, a NASCAR tire has a very high coefficient of friction when it is driving on a dry, concrete track. That is one of the reasons why NASCAR race cars can corner at such high speeds. The coefficient of friction for that same tire in mud would be almost zero. By contrast, huge, knobby, off-road tires wouldn't have as high a coefficient of friction on a dry track, but in the mud, their coefficient of friction is extremely high.
Wheel slip -- There are two kinds of contact that tires can make with the road: static and dynamic.
- static contact -- The tire and the road (or ground) are not slipping relative to each other. The coefficient of friction for static contact is higher than for dynamic contact, so static contact provides better traction.
- dynamic contact -- The tire is slipping relative to the road. The coefficient of friction for dynamic contact is lower, so you have less traction.
Quite simply, wheel slip occurs when the force applied to a tire exceeds the traction available to that tire. Force is applied to the tire in two ways:
- Longitudinally -- Longitudinal force comes from the torque applied to the tire by the engine or by the brakes. It tends to either accelerate or decelerate the car.
- Laterally -- Lateral force is created when the car drives around a curve. It takes force to make a car change direction -- ultimately, the tires and the ground provide lateral force.
Let's say you have a fairly powerful rear-wheel-drive car, and you are driving around a curve on a wet road. Your tires have plenty of traction to apply the lateral force needed to keep your car on the road as it goes around the curve. Let's say you floor the gas pedal in the middle of the turn (don't do this!) -- your engine sends a lot more torque to the wheels, producing a large amount of longitudinal force. If you add the longitudinal force (produced by the engine) and the lateral force created in the turn, and the sum exceeds the traction available, you just created wheel slip.
Most people don't even come close to exceeding the available traction on dry pavement, or even on flat, wet pavement. Four-wheel and all-wheel-drive systems are most useful in low-traction situations, such as in snow and on slippery hills.
The benefit of four-wheel drive is easy to understand: If you are driving four wheels instead of two, you've got the potential to double the amount of longitudinal force (the force that makes you go) that the tires apply to the ground.
This can help in a variety of situations. For instance:
- In snow -- It takes a lot of force to push a car through the snow. The amount of force available is limited by the available traction. Most two-wheel-drive cars can't move if there is more than a few inches of snow on the road, because in the snow, each tire has only a small amount of traction. A four-wheel-drive car can utilize the traction of all four tires.
- Off road -- In off-road conditions, it is fairly common for at least one set of tires to be in a low-traction situation, such as when crossing a stream or mud puddle. With four-wheel drive, the other set of tires still has traction, so they can pull you out.
- Climbing slippery hills -- This task requires a lot of traction. A four-wheel-drive car can utilize the traction of all four tires to pull the car up the hill.
There are also some situations in which four-wheel drive provides no advantage over two-wheel drive. Most notably, four-wheel-drive systems won't help you stop on slippery surfaces. It's all up to the brakes and the anti-lock braking system (ABS).
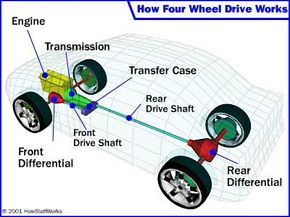
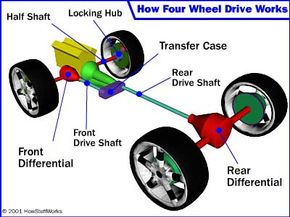
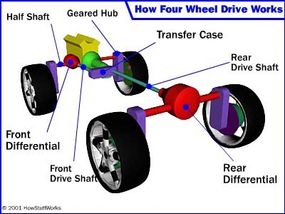
Now let's take a look at the parts that make up a four-wheel-drive system.