Some say you can't teach an old dog new tricks. But the continuously variable transmission (CVT), which Leonardo da Vinci conceptualized more than 500 years ago and is now replacing planetary automatic transmissions in some automobiles, is one old dog that has definitely learned a few new tricks. Indeed, ever since the first toroidal CVT patent was filed in 1886, the technology has been refined and improved. Today, several car manufacturers, including General Motors, Audi, Honda and Nissan, are designing their drivetrains around CVTs.
In this article, we'll explore how a CVT works in a typical rear-wheel driven car, answering several questions on the way:
Advertisement
How does a CVT compare to a conventional, planetary automatic transmission?
What parts does it have and how do those parts work?
What advantages do CVTs offer over conventional automatic transmissions? What about disadvantages?
What's the driving experience like in a car with a CVT?
What kind of makes and models incorporate CVTs?
Are there any other applications for CVTs other than automobiles?
First, we'll look at how a CVT compares to a traditional automatic transmission.
If you've read about the structure and function of automatic transmissions in How Automatic Transmissions Work, then you know that the job of the transmission is to change the speed ratio between the engine and the wheels of an automobile. In other words, without a transmission, cars would only have one gear -- the gear that would allow the car to travel at the desired top speed. Imagine for a moment driving a car that only had first gear or a car that only had third gear. The former car would accelerate well from a complete stop and would be able to climb a steep hill, but its top speed would be limited to just a few miles an hour. The latter car, on the other hand, would fly at 80 mph down the highway, but it would have almost no acceleration when starting out and wouldn't be able to climb hills.
So the transmission uses a range of gears -- from low to high -- to make more effective use of the engine's torque as driving conditions change. The gears can be engaged manually or automatically.
Advertisement
In a traditional automatic transmission, the gears are literally gears -- interlocking, toothed wheels that help transmit and modify rotary motion and torque. A combination of planetary gears creates all of the different gear ratios that the transmission can produce, typically four forward gears and one reverse gear. When this type of transmission cycles through its gears, the driver can feel jolts as each gear is engaged.
CVT Basics
Unlike traditional automatic transmissions, continuously variable transmissions don't have a gearbox with a set number of gears, which means they don't have interlocking toothed wheels. The most common type of CVT operates on an ingenious pulley system that allows an infinite variability between highest and lowest gears with no discrete steps or shifts.
Ford Freestyle Duratec engine with CVT
Photo courtesy Ford Motor Company
If you're wondering why the word "gear" still appears in the explanation of a CVT, remember that, broadly speaking, a gear refers to a ratio of engine shaft speed to driveshaft speed. Although CVTs change this ratio without using a set of planetary gears, they are still described as having low and high "gears" for the sake of convention.
Next, we'll look at the different types of CVTs: pulley-based, toroidal and hydrostatic.
No More Gears: A Timeline of CVT Innovation
1490 - da Vinci sketches a stepless continuously variable transmission
1886 - first toroidal CVT patent filed
1935 - Adiel Dodge receives U.S. patent for toroidal CVT
1939 - fully automatic transmission based on planetary gear system introduced
1958 - Daf (of The Netherlands) produces a CVT in a car
1989 - Subaru Justy GL is the first U.S.-sold production automobile to offer a CVT
2002 - Saturn Vue with a CVT debuts; first Saturn to offer CVT technology
2004 - Ford begins offering a CVT
Advertisement
Pulley-based CVTs
Pulley-based CVTs use an ingenious and simple pulley design.
Photo courtesy Nissan Global
Peer into a planetary automatic transmission, and you'll see a complex world of gears, brakes, clutches and governing devices. By comparison, a continuously variable transmission is a study in simplicity. Most CVTs only have three basic components:
A high-power metal or rubber belt
A variable-input "driving" pulley
An output "driven" pulley
CVTs also have various microprocessors and sensors, but the three components described above are the key elements that enable the technology to work.
Advertisement
HowStuffWorks
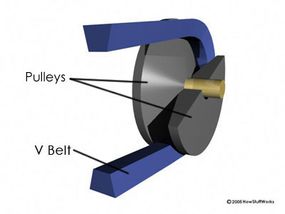
The variable-diameter pulleys are the heart of a CVT. Each pulley is made of two 20-degree cones facing each other. A belt rides in the groove between the two cones. V-belts are preferred if the belt is made of rubber. V-belts get their name from the fact that the belts bear a V-shaped cross section, which increases the frictional grip of the belt.
When the two cones of the pulley are far apart (when the diameter increases), the belt rides lower in the groove, and the radius of the belt loop going around the pulley gets smaller. When the cones are close together (when the diameter decreases), the belt rides higher in the groove, and the radius of the belt loop going around the pulley gets larger. CVTs may use hydraulic pressure, centrifugal force or spring tension to create the force necessary to adjust the pulley halves.
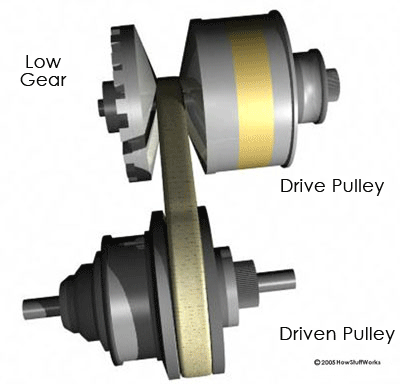
Variable-diameter pulleys must always come in pairs. One of the pulleys, known as the drive pulley (or driving pulley), is connected to the crankshaft of the engine. The driving pulley is also called the input pulley because it's where the energy from the engine enters the transmission. The second pulley is called the driven pulley because the first pulley is turning it. As an output pulley, the driven pulley transfers energy to the driveshaft.
The distance between the center of the pulleys to where the belt makes contact in the groove is known as the pitch radius. When the pulleys are far apart, the belt rides lower and the pitch radius decreases. When the pulleys are close together, the belt rides higher and the pitch radius increases. The ratio of the pitch radius on the driving pulley to the pitch radius on the driven pulley determines the gear.
HowStuffWorks
When one pulley increases its radius, the other decreases its radius to keep the belt tight. As the two pulleys change their radii relative to one another, they create an infinite number of gear ratios -- from low to high and everything in between. For example, when the pitch radius is small on the driving pulley and large on the driven pulley, then the rotational speed of the driven pulley decreases, resulting in a lower “gear.” When the pitch radius is large on the driving pulley and small on the driven pulley, then the rotational speed of the driven pulley increases, resulting in a higher “gear.” Thus, in theory, a CVT has an infinite number of "gears" that it can run through at any time, at any engine or vehicle speed.
The simplicity and stepless nature of CVTs make them an ideal transmission for a variety of machines and devices, not just cars. CVTs have been used for years in power tools and drill presses. They've also been used in a variety of vehicles, including tractors, snowmobiles and motor scooters. In all of these applications, the transmissions have relied on high-density rubber belts, which can slip and stretch, thereby reducing their efficiency.
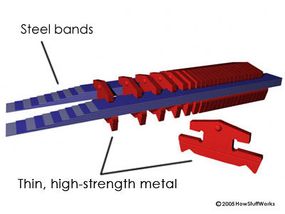
Metal belt design
HowStuffWorks
The introduction of new materials makes CVTs even more reliable and efficient. One of the most important advances has been the design and development of metal belts to connect the pulleys. These flexible belts are composed of several (typically nine or 12) thin bands of steel that hold together high-strength, bow-tie-shaped pieces of metal.
Metal belts don't slip and are highly durable, enabling CVTs to handle more engine torque. They are also quieter than rubber-belt-driven CVTs.
Advertisement
Toroidal CVTs
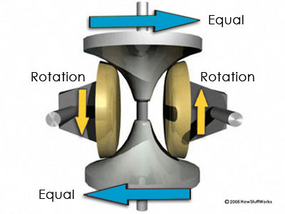
Another version of the CVT -- the toroidal CVT system -- replaces the belts and pulleys with discs and power rollers.
Although such a system seems drastically different, all of the components are analogous to a belt-and-pulley system and lead to the same results -- a continuously variable transmission. Here's how it works:
Advertisement
One disc connects to the engine. This is equivalent to the driving pulley.
Another disc connects to the drive shaft. This is equivalent to the driven pulley.
Rollers, or wheels, located between the discs act like the belt, transmitting power from one disc to the other.
HowStuffWorks
The wheels can rotate along two axes. They spin around the horizontal axis and tilt in or out around the vertical axis, which allows the wheels to touch the discs in different areas. When the wheels are in contact with the driving disc near the center, they must contact the driven disc near the rim, resulting in a reduction in speed and an increase in torque (i.e., low gear). When the wheels touch the driving disc near the rim, they must contact the driven disc near the center, resulting in an increase in speed and a decrease in torque (i.e., overdrive gear). A simple tilt of the wheels, then, incrementally changes the gear ratio, providing for smooth, nearly instantaneous ratio changes.
Advertisement
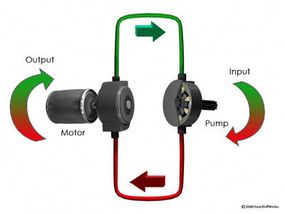
Hydrostatic CVTs
Both the pulley-and-V-belt CVT and the toroidal CVT are examples of frictional CVTs, which work by varying the radius of the contact point between two rotating objects. There is another type of CVT, known as a hydrostatic CVT, that uses variable-displacement pumps to vary the fluid flow into hydrostatic motors. In this type of transmission, the rotational motion of the engine operates a hydrostatic pump on the driving side. The pump converts rotational motion into fluid flow. Then, with a hydrostatic motor located on the driven side, the fluid flow is converted back into rotational motion.
HowStuffWorks
Often, a hydrostatic transmission is combined with a planetary gearset and clutches to create a hybrid system known as a hydromechanical transmission. Hydromechanical transmissions transfer power from the engine to the wheels in three different modes. At a low speed, power is transmitted hydraulically, and at a high speed, power is transmitted mechanically. Between these extremes, the transmission uses both hydraulic and mechanical means to transfer power. Hydromechanical transmissions are ideal for heavy-duty applications, which is why they are common in agricultural tractors and all-terrain vehicles.
Advertisement
CVT Benefits
Continuously variable transmissions are becoming more popular for good reason. They boast several advantages that make them appealing both to drivers and to environmentalists. Here are some of the key features and benefits of CVTs:
Features
Constant, stepless acceleration from a complete stop to cruising speed
Works to keep the car in its optimum power range regardless of how fast the car is traveling
Responds better to changing conditions, such as changes in throttle and speed
Less power loss in a CVT than a typical automatic transmission
Better control of a gasoline engine's speed range
Can incorporate automated versions of mechanical clutches
Benefits
Eliminates "shift shock" -- makes for a smoother ride
Improved fuel efficiency
Eliminates gear hunting as a car decelerates, especially going up a hill
Better acceleration
Better control of emissions
Replace inefficient fluid torque converter
In the next section, we'll look at what it's like to drive a CVT-based car.
Advertisement
A CVT Test Drive
Cars with CVTs have been common in Europe for years. But it's taken a while for the technology to gain a foothold in the United States. The first production automobile to offer a CVT in the United States was the Subaru Justy.
Photo courtesy Subaru Justy
Sold between 1989 and 1993, the Justy never attracted the attention of American drivers. So what's different about newer CVT-based cars -- cars like the Saturn Vue, the Audi A4 and A6, the Nissan Murano and the Honda Insight? The best way to answer that question is to take one of these cars for a test drive.
Advertisement
When you step on the gas pedal of a car with a continuously variable transmission, you notice the difference immediately. The engine revs up toward the rpms at which it produces the most power, and then it stays there. But the car doesn't react immediately. Then, a moment later, the transmission kicks in, accelerating the car slowly, steadily and without any shifts. In theory, a car with a CVT should reach 60 mph (100 km/hr) 25-percent faster than the same car with the same engine and a manual transmission [ref]. That's because the CVT converts every point on the engine's operating curve to a corresponding point on its own operating curve.
If you look at the power output curve for the car without a CVT, you can see this to be true. Notice that the tachometer in this situation shows the engine revving up and down with each gear change, which is recorded as a spike in the power output curve (and which the driver feels as a jolt).
CVTs are equally efficient on hills. There is no "gear hunting," because the CVT cycles steplessly down to a gear ratio appropriate for the driving conditions. A conventional automatic transmission shifts back and forth trying to find the right gear, which is far less efficient.
With all of their advantages, CVTs do have some shortcomings. In the United States, they are still trying to overcome an image problem. The Subaru Justy, for example, was known as a gutless micro-car. Traditionally, belt-drive CVTs were limited in the amount of torque they could handle and were larger and heavier than their automatic and manual counterparts. Technological advances have put CVTs in the realm of their competition -- the Nissan Murano's CVT can handle its 3.5-liter, 245-horsepower V6 engine -- but first impressions are hard to overcome.
For more information on continuously variable transmissions and related topics, check out the links that follow.